-
×
 Hộp đựng linh kiện 15 ngăn 17.5x10x2.3
Hộp đựng linh kiện 15 ngăn 17.5x10x2.3SKU: 00391-T1-D
1 × 12.960 VNĐ
Tổng số phụ: 12.960 VNĐ (gồm VAT)

Giao thức CAN FD (Controller Area Network – Flexible Data-Rate) là một bản mở rộng của giao thức CAN truyền thống (CAN 2.0). CAN FD được xem là phiên bản kế nhiệm của CAN 2.0, cung cấp khả năng hỗ trợ điều khiển thời gian thực trong hệ thống phân tán với mức độ bảo mật cao. Giao thức này được Bosch phát triển và sau đó được chuẩn hóa thành ISO 11898-1:2015, phù hợp cho các ứng dụng trong công nghiệp, ô tô và hệ thống nhúng nói chung.
Tuy nhiên, phiên bản gốc của Bosch (thường gọi là non-ISO CAN FD) không tương thích với phiên bản đã được chuẩn hóa (ISO CAN FD). Điều này có nghĩa là hai phiên bản này không thể giao tiếp trực tiếp với nhau do có một số khác biệt trong cách xử lý dữ liệu và kiểm tra lỗi.

Giao thức CAN đã xuất hiện từ năm 1986 và trở nên cực kỳ phổ biến. Hầu hết các phương tiện di chuyển ngày nay như ô tô, xe tải, thuyền, máy bay, robot đều sử dụng CAN.
Tuy nhiên, với sự phát triển nhanh chóng của công nghệ hiện đại, CAN truyền thống (Classical CAN) đang gặp nhiều thách thức:
Một vấn đề lớn của Classical CAN là quá nhiều dữ liệu thừa (overhead) với hơn 50%, do mỗi khung dữ liệu chỉ chứa tối đa 8 byte dữ liệu. Ngoài ra, tốc độ truyền bị giới hạn ở 1 Mbit/s, gây khó khăn khi triển khai các tính năng yêu cầu truyền nhiều dữ liệu.
CAN FD ra đời để giải quyết các hạn chế trên, giúp giao thức CAN trở nên mạnh mẽ và phù hợp với tương lai.
Trong thực tế, CAN FD có thể cải thiện băng thông lên gấp 3 đến 8 lần so với CAN truyền thống (Classical CAN). Điều này giúp đơn giản hóa việc mở rộng hệ thống, đáp ứng nhu cầu trao đổi dữ liệu ngày càng tăng mà không cần đến các giải pháp phức tạp và tốn kém.
Xem thêm: Giao thức 1-Wire là gì? Tất cả những điều bạn cần biết
Về lý thuyết, CAN FD có vẻ khá đơn giản: tăng tốc độ truyền dữ liệu và đóng gói nhiều dữ liệu hơn vào mỗi khung tin nhắn. Nhưng trong thực tế, điều này không hề đơn giản.

Câu hỏi: Tại sao không mở rộng khung CAN cũ lên 64 byte?
Giải pháp của CAN FD: Tăng tốc độ truyền dữ liệu để khung tin lớn vẫn được gửi đi nhanh chóng mà không làm nghẽn mạng.
Câu hỏi: Vậy tại sao không tăng tốc toàn bộ khung tin luôn?
Ví dụ:
Giải pháp của CAN FD:
Xem thêm: Inter-IC sound (I2S) là gì? Hiểu về giao thức truyền âm thanh số
CAN FD là phiên bản cải tiến của giao thức CAN truyền thống (Classical CAN), giúp:
• Gửi được nhiều dữ liệu hơn (tối đa 64 byte thay vì chỉ 8 byte).
• Tốc độ truyền cao hơn (lên đến 5 Mbit/s so với 1 Mbit/s).
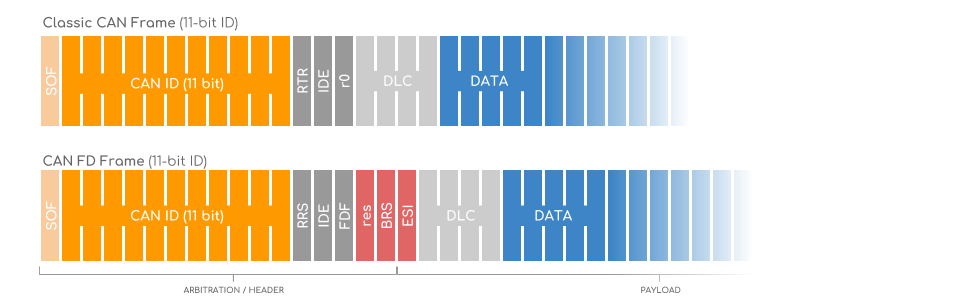
• CAN truyền thống: Có khung yêu cầu dữ liệu (Remote Frame) – giúp một thiết bị trên mạng yêu cầu dữ liệu từ thiết bị khác mà không cần tự gửi dữ liệu.
• CAN FD: Không còn Remote Frame nữa, nên bit này luôn có giá trị 0 (dominant), nghĩa là một thiết bị không thể yêu cầu dữ liệu từ thiết bị khác bằng cách gửi một khung trống.
• CAN truyền thống: Có một bit dự trữ gọi là r0 (luôn bằng 0).
• CAN FD: Đổi r0 thành FDF (FD Format) và đặt giá trị 1 (recessive) để báo hiệu đây là khung CAN FD. Nếu một thiết bị CAN truyền thống gặp FDF = 1, nó sẽ báo lỗi.
• BRS = 0 (dominant) ➝ Dữ liệu gửi với tốc độ bình thường (tối đa 1 Mbit/s).
• BRS = 1 (recessive) ➝ Dữ liệu gửi với tốc độ cao hơn (tối đa 5 Mbit/s).
• ESI = 0 (dominant) ➝ Thiết bị đang ở chế độ bình thường (error active).
• ESI = 1 (recessive) ➝ Thiết bị đang ở chế độ bị lỗi (error passive).

• CAN truyền thống: Mỗi khung dữ liệu chỉ chứa tối đa 8 byte.
• CAN FD: Có thể chứa tối đa 64 byte bằng cách mở rộng mã DLC (Data Length Code): ví dụ: DLC = 9 nghĩa là có 12 byte, DLC = 15 nghĩa là có 64 byte.
Khi truyền dữ liệu trên mạng CAN (Controller Area Network), ta cần đảm bảo dữ liệu không bị lỗi trong quá trình truyền. Để làm được điều đó, CAN FD sử dụng hai cơ chế quan trọng:
• SBC (Stuff Bit Count) → Giúp kiểm soát các bit nhồi nhằm tránh lỗi truyền.
• CRC (Cyclic Redundancy Check) → Giúp kiểm tra lỗi toàn bộ khung dữ liệu.
Xem thêm: Tìm hiểu về Universal Serial Bus (USB)
Vấn đề khi truyền dữ liệu trong CAN:
• Trong CAN, nếu có quá nhiều bit giống nhau liên tiếp (ví dụ: 000000 hoặc 111111), đồng hồ của các thiết bị có thể mất đồng bộ, gây lỗi truyền dữ liệu.
• Để khắc phục, bit nhồi (Stuff Bit) được chèn vào khi có quá nhiều bit giống nhau liên tiếp, giúp đường truyền ổn định hơn.
Vai trò của SBC trong CAN FD: SBC giúp kiểm soát số lượng bit nhồi trong khung dữ liệu để đảm bảo việc phát hiện lỗi chính xác hơn.
SBC bao gồm:
• 3 bit mã Gray: Lưu số lượng bit nhồi được thêm vào.
• 1 bit chẵn lẻ (Parity Bit): Giúp phát hiện lỗi trong SBC.
• 1 bit nhồi cố định (Fixed Stuff Bit): Giống như một bit chẵn lẻ thứ hai để tăng độ tin cậy.
CRC là một dãy bit đặc biệt được tính toán từ dữ liệu gốc. Khi gửi dữ liệu, bên gửi sẽ tính toán CRC và gửi kèm theo khung dữ liệu. Bên nhận cũng tính toán CRC từ dữ liệu nhận được, rồi so sánh với CRC nhận được từ bên gửi:
• Nếu khớp nhau → Dữ liệu không bị lỗi.
• Nếu khác nhau → Dữ liệu bị lỗi và phải gửi lại.
CAN truyền thống (CAN 2.0): CRC có 15 bit.
CAN FD:
• Nếu khung dữ liệu có ≤ 16 byte, CRC có 17 bit.
• Nếu khung dữ liệu có 20 – 64 byte, CRC có 21 bit.
• Thêm 4 bit nhồi cố định để giảm lỗi trong truyền tốc độ cao.
Lợi ích của CRC dài hơn trong CAN FD:
• CAN FD truyền dữ liệu nhiều hơn (tối đa 64 byte so với 8 byte của CAN truyền thống).
• CRC dài hơn giúp bảo vệ dữ liệu tốt hơn, tránh sai sót khi truyền tốc độ cao.
Giống CAN truyền thống, các thiết bị nhận dữ liệu phải xác nhận bằng cách kéo bit ACK xuống 0 (dominant).
Xem thêm: Tìm hiểu về Digital-to-Analog Converter (DAC)
Overhead là phần dữ liệu không phải payload nhưng vẫn phải truyền để đảm bảo giao tiếp đúng và ổn định.
Ví dụ trong CAN bus:
• Overhead: Các bit bổ sung như ID, CRC, ACK, Start/Stop bits,… giúp kiểm soát lỗi và đảm bảo dữ liệu đến đúng nơi.
• Payload: Phần dữ liệu thực sự được truyền (ví dụ: tốc độ động cơ, nhiệt độ, cảm biến, v.v.).
Nếu overhead chiếm quá nhiều so với payload, hiệu suất sẽ thấp. Ngược lại, nếu payload nhiều hơn so với overhead, hiệu suất sẽ cao hơn.
Có phải CAN FD giúp giảm overhead?
• KHÔNG! Thực tế, CAN FD thêm nhiều bit mới như BRS, ESI, CRC lớn hơn → tổng số bit nhiều hơn.
• Nếu chỉ gửi ít dữ liệu (dưới 8 byte), hiệu suất của CAN FD còn kém hơn CAN truyền thống do overhead tăng.
Khi nào CAN FD hiệu quả hơn?
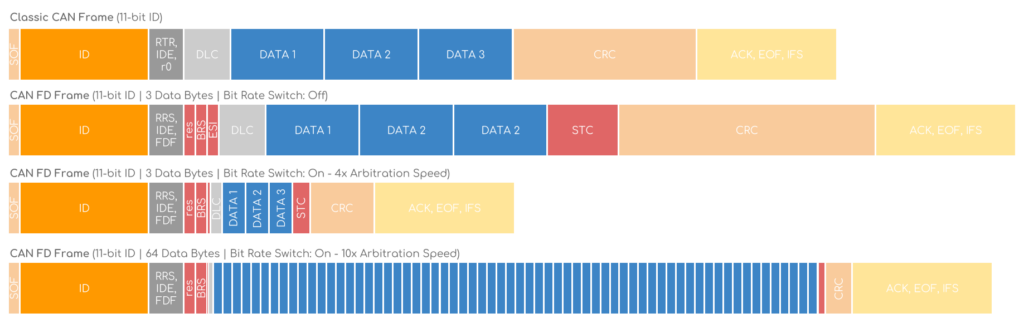
• CAN FD cho phép gửi đến 64 byte dữ liệu trong 1 frame, trong khi CAN truyền thống chỉ tối đa 8 byte.
• Khi số byte tăng lên, tỷ lệ giữa payload và overhead tăng, giúp hiệu suất truyền dữ liệu tốt hơn.
• Ở mức 64 byte, hiệu suất có thể đạt 90%, so với khoảng 50% của CAN truyền thống.
Hiệu suất = (Số bit dữ liệu thực / Tổng số bit của frame) × 100%
CAN truyền thống (Max 8 byte payload):
• Một frame CAN chứa khoảng 50-60 bit overhead.
• Nếu chỉ có 8 byte (64 bit) dữ liệu, tổng số bit của frame là khoảng 120 bit.
• Hiệu suất = 64 / 120 ≈ 53%
CAN FD (Max 64 byte payload):
• Vẫn có overhead (và còn tăng nhẹ do CRC lớn hơn), nhưng payload tối đa là 64 byte (512 bit).
• Tổng số bit của frame lúc này khoảng 570 bit.
• Hiệu suất = 512 / 570 ≈ 90%
• Trong CAN truyền thống, tốc độ tối đa thường chỉ là 1 Mbit/s. Nếu gửi 64 byte dữ liệu, thời gian truyền sẽ khá lâu, dễ làm tắc nghẽn bus.
• CAN FD có thể chuyển sang tốc độ cao hơn khi truyền dữ liệu, giúp giảm thời gian chiếm dụng bus, tăng hiệu suất hệ thống.
Giải pháp: Bit Rate Switching (BRS) – cho phép tăng tốc độ chỉ trong phần dữ liệu của frame CAN FD:
• Khi bit BRS = 1, tốc độ truyền dữ liệu (payload) sẽ tăng lên, ví dụ từ 1 Mbit/s → 5 Mbit/s.
• Nhưng phần arbitration (tranh chấp bus) vẫn giữ tốc độ thấp hơn (ví dụ 1 Mbit/s) để đảm bảo tất cả các node đều có thể nghe thấy.
• Tốc độ tăng 5 lần, giúp tiết kiệm băng thông và giảm độ trễ.
Nếu tất cả các node đều hỗ trợ CAN FD → có thể truyền cả frame CAN cổ điển và CAN FD mà không vấn đề gì.
Nếu có node CAN cổ điển trong mạng → cần đảm bảo chúng không bị lỗi khi thấy frame CAN FD. Một số cách để tránh lỗi:
• Tắt các node CAN cổ điển khi cần gửi dữ liệu lớn qua CAN FD (ví dụ khi cập nhật firmware ECU).
• Chỉ dùng frame CAN cổ điển khi giao tiếp với node cũ.
Có nhiều thông tin khác nhau về tốc độ tối đa của CAN FD:
Thực tế: 5 – 8 Mbit/s (tùy vào thiết kế bus và điều kiện môi trường).
Lý thuyết: có thể lên đến 12 – 15 Mbit/s trong điều kiện lý tưởng (ngắn, ít nhiễu, nhiệt độ ổn định).
Trong ô tô: Hầu hết các hãng xe chỉ dùng ≤ 5 Mbit/s, vì:
• Không có chuẩn công nghiệp cho tốc độ cao hơn.
• Nếu cần tốc độ cao hơn, có thể dùng Ethernet ô tô (10BASE-T1).
Tóm lại, CAN FD mang đến một bước tiến lớn so với giao thức CAN truyền thống, giúp nâng cao băng thông, giảm độ trễ và tối ưu hiệu suất truyền dữ liệu. Nhờ khả năng hỗ trợ tốc độ cao và dung lượng dữ liệu lớn hơn trong mỗi khung tin, CAN FD trở thành lựa chọn lý tưởng cho các hệ thống yêu cầu giao tiếp nhanh và ổn định, đặc biệt trong ngành công nghiệp ô tô, tự động hóa và hệ thống nhúng. Việc hiểu rõ về CAN FD không chỉ giúp tối ưu thiết kế hệ thống mà còn đảm bảo tính tương thích và hiệu quả trong quá trình triển khai thực tế.
Xem thêm: Analog-to-Digital Converter (ADC): Nguyên lý và Ứng dụng